Avant toute chose, nous allons commencer par un petit rappel de vocabulaire autour des différents capteurs inertiels existants :
- Gyroscope : Capteur indiquant la position angulaire.
- Gyromètre : Capteur indiquant la vitesse angulaire.
- Accéléromètre : Capteur indiquant l'accélération linéaire.
- Centrale inertielle : Capteur embarquant un gyromètre à trois axes et un accéléromètre à trois axes et permettant de déterminer la position du mobile sur lequel il a été fixé à condition de connaître la position d'origine de ce dernier (technologie utilisée à bord des avions par exemple).
La carte de développement ATAVRSBIN1 que nous allons tester au cours de cet article est équipée de deux de ces capteurs : elle embarque un gyromètre (ITG-3200) et un accéléromètre (BMA-150). Le ITG-3200 est pourtant vendu comme étant un gyroscope, mais en regardant sa datasheet, on s'aperçoit qu'il retourne une mesure en °/s. C'est une erreur très commune donc prenez garde la prochaine fois que vous sélectionnerez un produit de la sorte.
La ATAVRSBIN1 possède également une boussole électronique à effet de Hall (AK8975). Cette dernière ne repose donc pas sur le principe d'inertie et n'est par conséquent pas un capteur inertiel contrairement à l'intitulé du produit.
Une autre petite subtilité : les circuits ITG-3200 et BMA-150, en plus de faire office respectivement de gyromètre et d’accéléromètre, embarquent également un capteur de température.
Tous les circuits cités plus haut utilisent un bus I²C pour s'interconnecter avec d'autres systèmes électroniques.
Enfin, la carte est disponible chez Farnell.
Montage de test
Pour ce test, j'ai utilisé une carte microcontrôleur Arduino Uno (rev3) afin de lire les valeurs renvoyées par les différents capteurs au moyen d'une liaison I²C. Le câblage est le suivant :
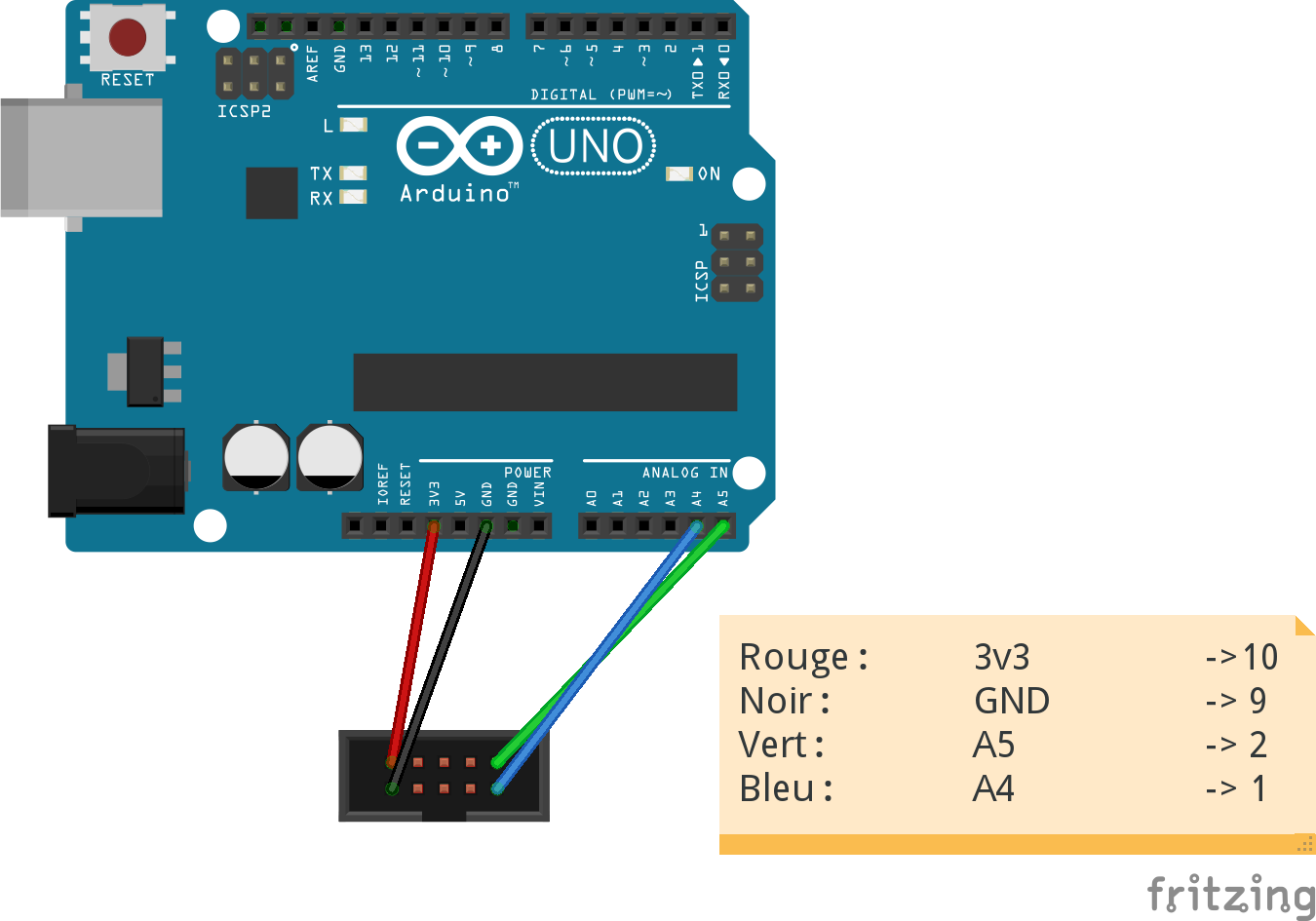
Communication I²C avec les capteurs
La datasheet de la carte ATAVRSBIN1 nous donne les adresses I²C suivantes :
- AK8975 : 0x0C
- BMA-150 : 0x38
- ITG-3200 : 0x68
Côté logiciel, j'ai utilisé la bibliothèque Wire du projet Arduino.
Exemple avec le gyromètre ITG-3200
Plusieurs bibliothèques pour Arduino sont disponibles afin de communiquer avec les différents circuits de la carte ATAVRSBIN1. Je ne vais donc pas réinventer la roue mais plutôt donner un exemple à titre pédagogique sur comment établir la communication I²C afin de récupérer les valeurs qui nous intéressent. Pour cela, j'ai choisi de me concentrer sur le gyromètre ITG-3200.
Les registres internes contenant les valeurs retournées par les capteurs sont données dans la datasheet sous forme du tableau suivant :
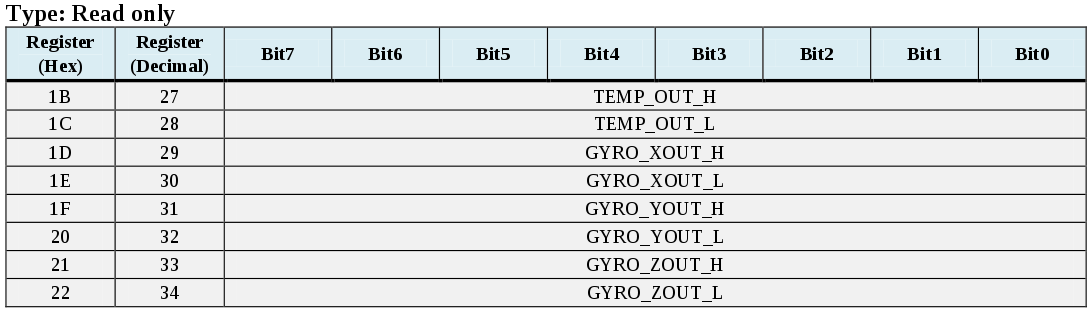
Chaque capteur retourne une valeur sur 16 bits codée en code complément à 2. Étant donné que la lecture se fait octet par octet sur un bus I²C, il sera nécessaire d'utiliser des décalages par 8 pour reconstituer nos valeurs sur 16 bits.
Nous allons récupérer l'ensemble de ces valeurs d'un seul coup en lisant 8 octets à partir de l'adresse du premier registre, à savoir 0x1B. La séquence de "burst read" utilisée pour lire plusieurs octets en une seule interrogation I²C est la suivante :

Une fois les valeurs récupérées, il sera nécessaire d'effectuer quelques opérations mathématiques afin d'obtenir des unités lisibles, à savoir des °C pour le capteur de température et des degrés par seconde pour les trois axes du gyromètre.
Enfin, voici le code utilisé pour cet exemple :
#include <Wire.h>
void setup()
{
Wire.begin();
Serial.begin(9600);
}
const float gyro_factor = 14.375;
byte reading[8];
short temp_out = 0, x = 0, y = 0, z = 0;
float gyro_x = 0, gyro_y = 0, gyro_z = 0, temp = 0;
void loop()
{
int i = 0;
Wire.beginTransmission(0x68); // ITG_3200 address
Wire.write(byte(0x1b)); // TEMP_OUT_H address
Wire.endTransmission(false);
Wire.requestFrom(0x68, 8);
while (Wire.available())
{
reading[i] = Wire.read();
i++;
}
temp_out = (reading[0] << 8) | reading[1];
temp = 35 + (temp_out + 13200) / 280.0;
x = (reading[2] << 8) | reading[3];
gyro_x = x / gyro_factor;
y = (reading[4] << 8) | reading[5];
gyro_y = y / gyro_factor;
z = (reading[6] << 8) | reading[7];
gyro_z = z / gyro_factor;
Serial.println(temp);
Serial.println(gyro_x);
Serial.println(gyro_y);
Serial.println(gyro_z);
Serial.println("------------");
Wire.endTransmission();
delay(1000);
}